MIRRORS AND µC!
We decided to use the Teensy 3.5 micrcontroller-board as the master µC and an Arduino Pro-Mini as a slave for the ball.
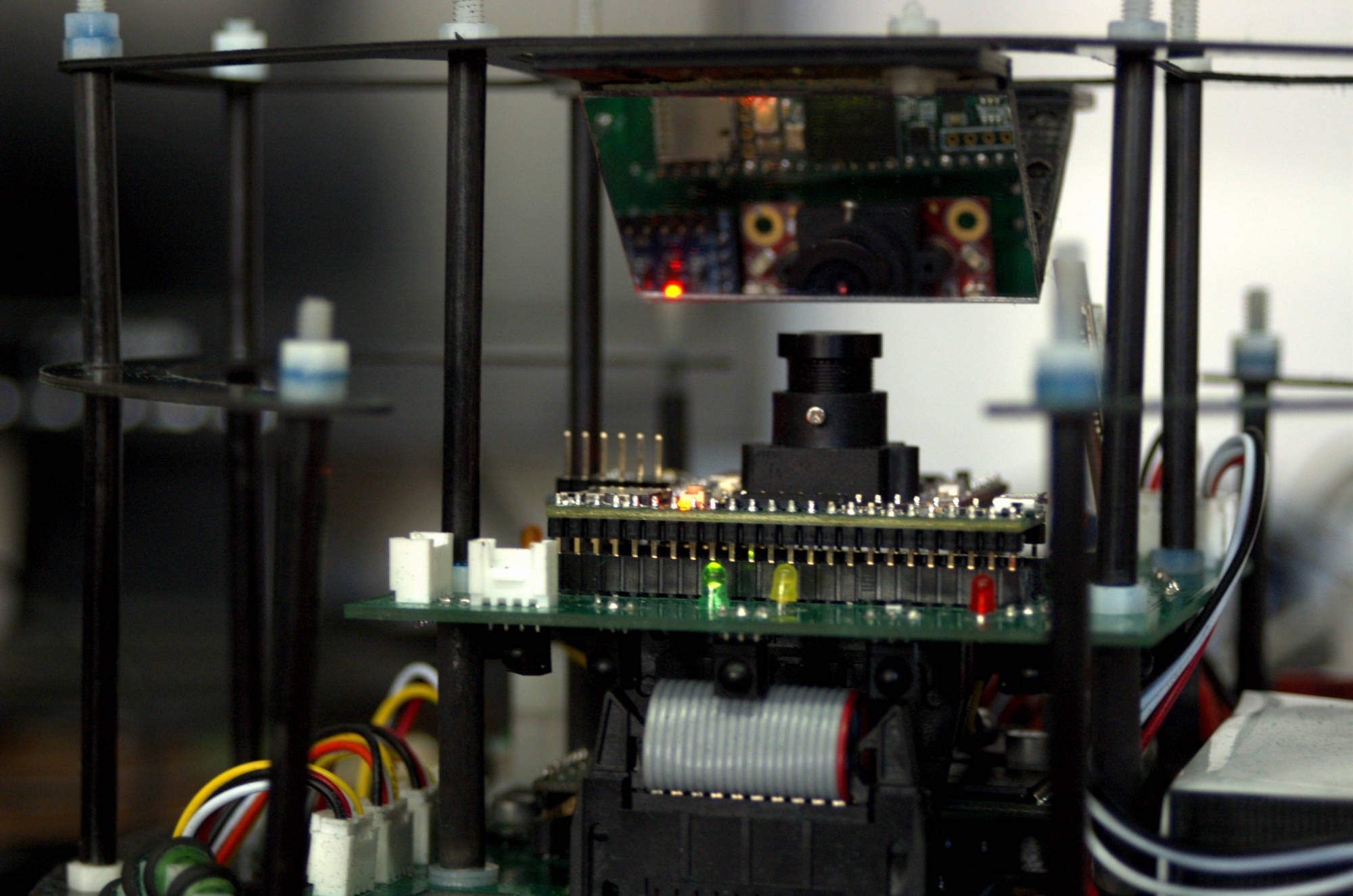
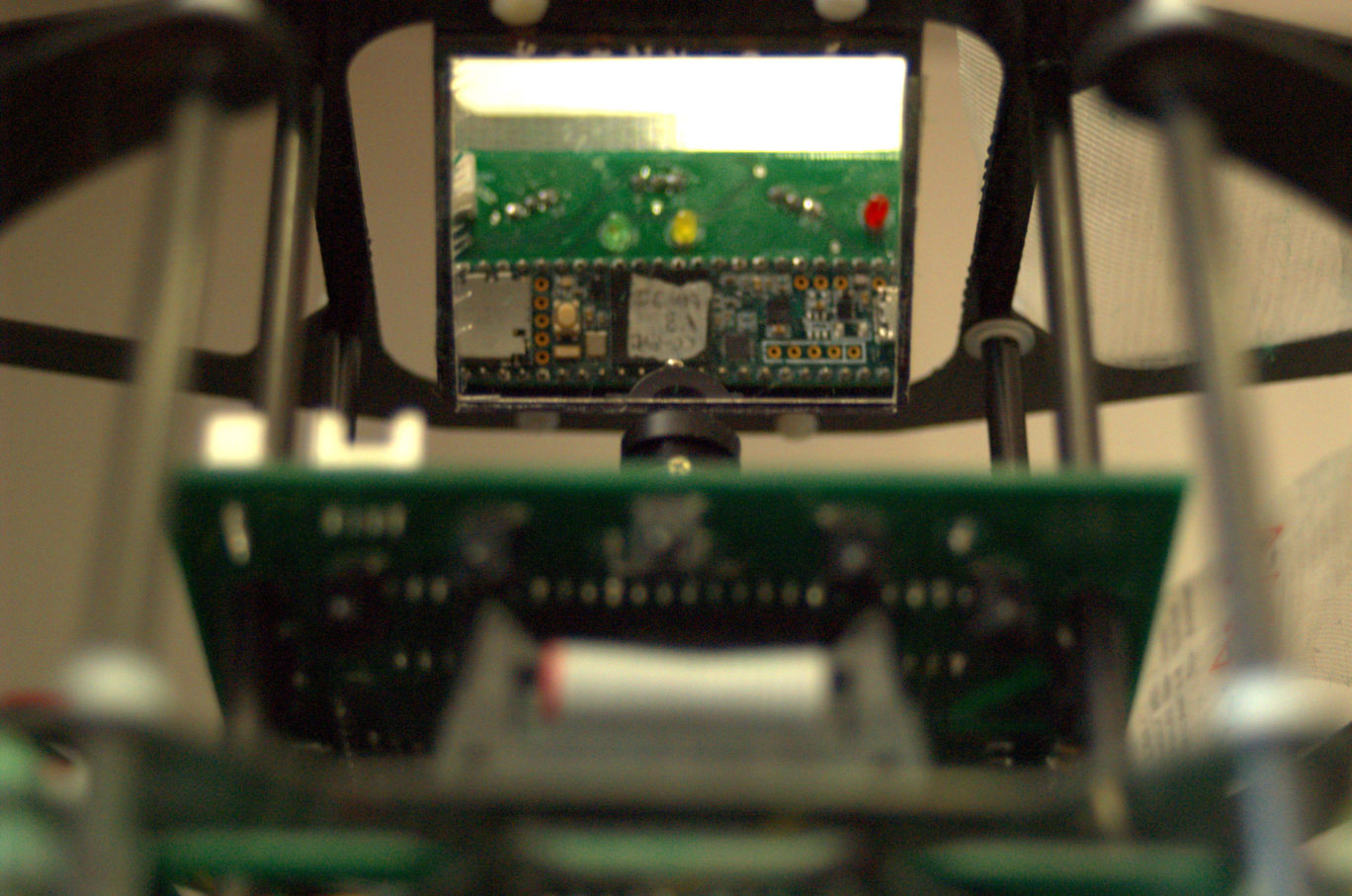
For our machine vision we use an OpenMV M7 camera with a V-shaped mirror to see both of the goal spot in the same frame (very smart!)